
Vorher


Es wurden pneumatische Antriebe verwendet und die Ansteuerung erfolgte nur durch die Taster und den PC.
Nacher
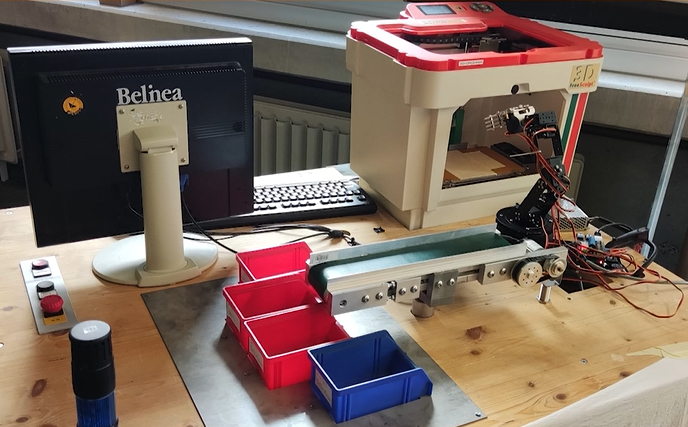
Pneumatische Antriebe wurden mit elektrische Antriebe ersetzt. Die Anlage wird über ein mobiles Endgerät oder über ein PC gesteuert und visualisiert. Der Kunde wählt das zu druckende Objekt (z. B. Deckel Salzstreuer) und der Druckvorgang wird gestartet. Dies erfolgt über Node Red auf dem Raspberry Pi. Nach dem Druckvorgang hebt der Roboterarm das gedruckte Objekt und legt es auf ein Förderband. Der Roboterarm wird über ein Raspberry Pi gesteuert. Das Förderband dreht sich zu der passenden Box und fördert das Objekt Richtung Box. Das Objekt fällt hinein. Das Förderband wird von der SPS (Speicher Programmierbare Steuerung, Siemens CPU 1214C) gesteuert.