
Nils
Nils · 02.02.2023
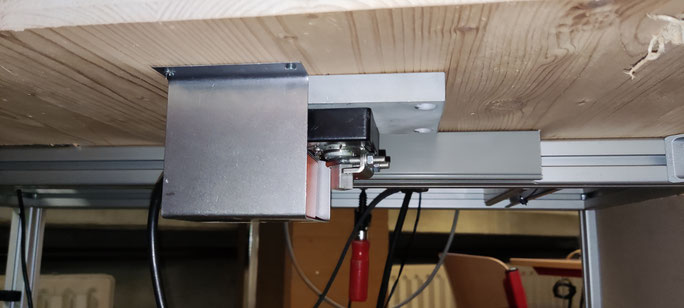
Heute habe ich die Drehvorrichtung des Förderbands an der Tischunterseite befestigt. Anschließend habe ich den induktiven Sensor zur Erkennung der Grundstellung am Tisch montiert und den Sensor, sowie den Drehantrieb verdrahtet. Nachdem alle Bauteile fertig angeschlossen waren, habe ich das vorbereitete SPS-Programm auf die SPS geladen und die Zeiten für Fahrten auf die einzelnen Boxen ermittelt.
Nils · 30.01.2023
Heute haben wir das Fachgespräch basierend auf unserer Projektdokumentation geführt. Anschließend haben wir den Raum für den Tag der offenen Tür vorbereitet.
Nils · 23.01.2023
Ich habe weiter an der Verbindung zwischen Drehantrieb und Förderband gearbeitet. Dazu habe ich ein Vierkantstück aus Aluminium zurechtgeschnitten und mit einer Bohrung versehen. In diese Bohrung habe ich dann einen Zylinderstift gesteckt und Bohrungen für Madenschrauben vorbereitet. Anschließend habe ich Gewinde in die Löcher geschnitten und den Zylinderstift an der entsprechenden Stelle angesenkt, sodass die Madenschraube in dem Zylinderstift hält.
Nils · 16.01.2023
Ich habe die s-förmigen Halterungen für die Behälterboxen an der Platte montiert. Anschließend habe ich an dem Verbindungsstück zwischen dem Drehantrieb und dem Förderband gearbeitet.
Nils · 09.01.2023
Nach der Abgabe der Projektdokumentation, haben wir die s-förmigen Halterungen für die Behälterboxen gebogen. Außerdem habe ich weiter an dem SPS-Programm gearbeitet.

Nils · 19.12.2022
Nach einem Elektromotor zum Drehen des Förderbands gesucht. Im Lager einen Klappenantrieb von Belimo gefunden. Im Internet nach einem Schaltplan gesucht und nach diesem den Motor angeschlossen, um den Motor auf Funktion zu testen. Nach einer alternativen PWM-Platine für den Raspberry Pi gesucht.
Nils · 12.12.2022
Die übrigen 2 Seitenwände der Behälterbox zugeschnitten und gebogen. Anschließend an allen Teilen die Löcher zur Befestigung eingezeichnet, gekörnt und gebohrt. Dann die Platten miteinander verschraubt.
Nils · 05.12.2022
Router für die Netzwerkverbindung zwischen SPS, Raspberry Pi und Endgeräten installiert. Verbindungstests durchgeführt. Mit der Fertigung des Behälters für die Entnahmeboxen begonnen. Dazu auf Grundlage der technischen Zeichnung die Metallplatten an der Schlagschere zugeschnitten und anschließend gebogen.

Nils · 21.11.2022
Die alten Bauteile, wie den pneumatischen Greifer und die Pneumatikschläuche demontiert. Den Plattenausschnitt für die Behälterbox ausgemessen, angezeichnet und anschließend mit einer Stichsäge ausgeschnitten.